Shengmilo Mx02s Infos
Sheng Milo MX02S Infos
Here’s some notes about Sheng Milo MX02S.
Motor
Has a PCB inside with “LDX104-120-003X” silkscreen.
OEM Parts
Light and Horn Button - Star Union E-BIKE-DK226/2
Light and Horn - EF300
Battery
OEM Reention Polly DP-6C.
Layout: 13S5P
Charging port: DC2.1/DC2.5 (unsure)
Also sold under
| name | bike |
|---|---|
| Alfina | ALFINA FX02S Turbo |
| CEAYA | CEAYA MX02S |
| GUNAI | |
| VOZCVOX |
Controller
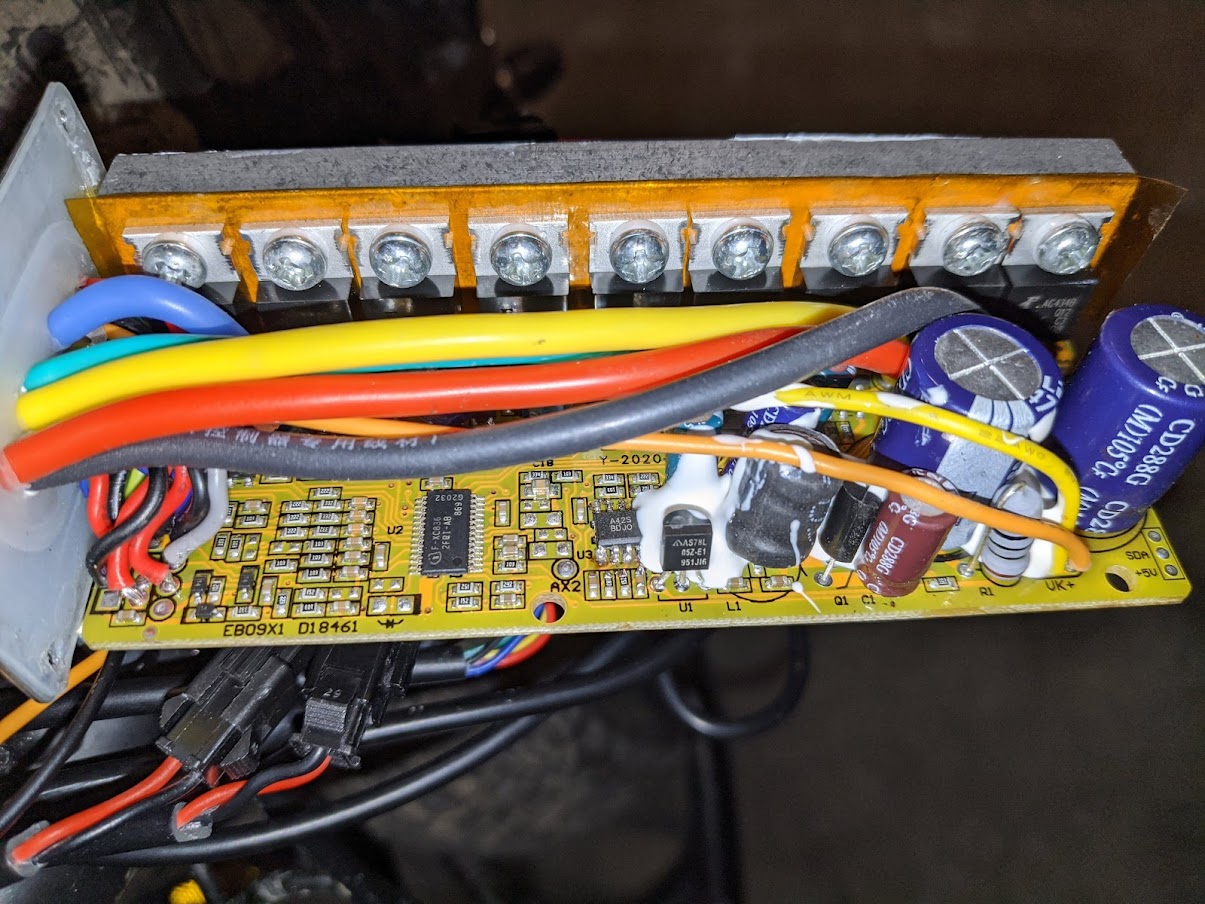
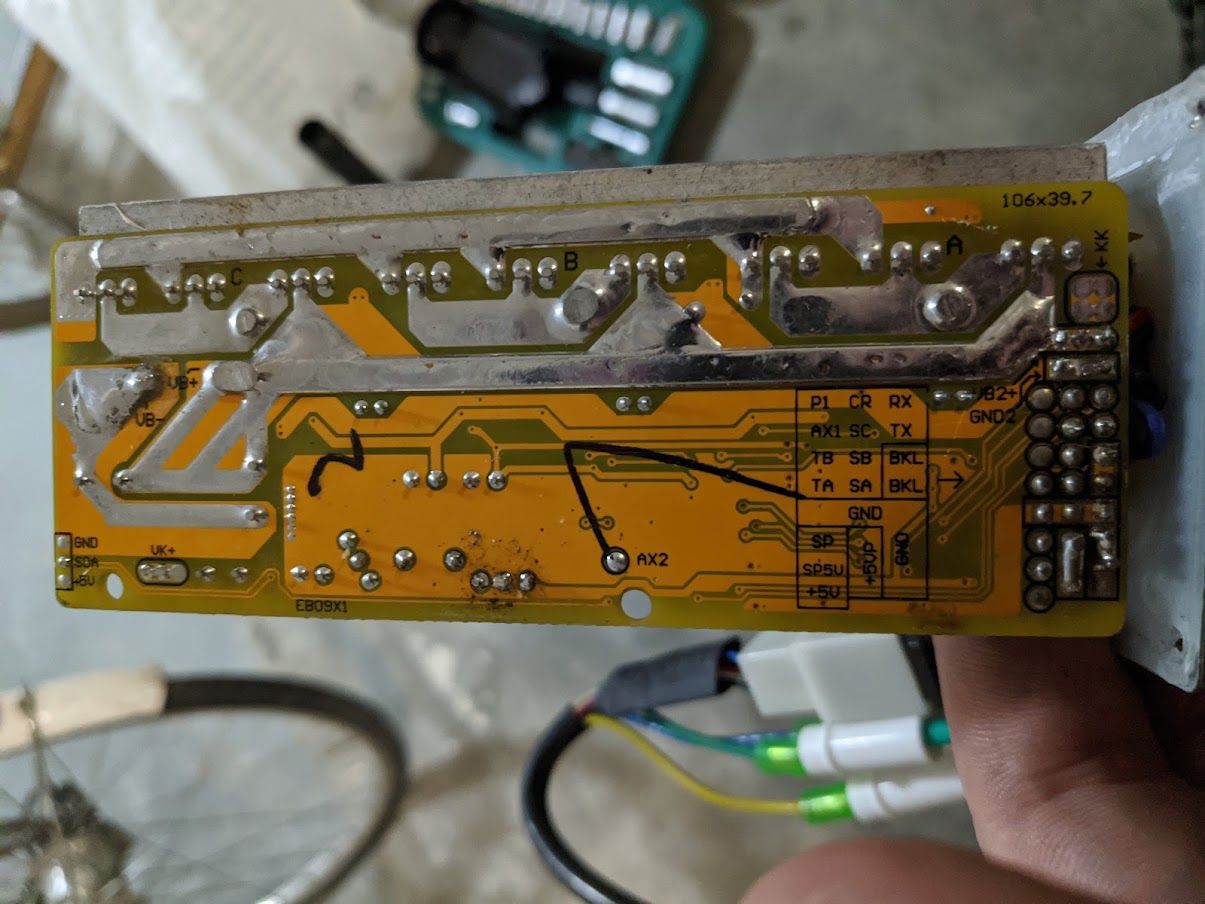
| connector | PCB | C colors | B colors | purpose |
|---|---|---|---|---|
| JST-SM 5P M | GND TX RX VK+ VB+ |
black green blue yellow red |
GND cont->disp disp->cont VBAT when display on VBAT |
display |
| JST-SM 2P M | GND BKL |
black green/yellow |
black red |
e-brake |
| JST-SM 2P M | GND BKL |
black green/yellow |
black red |
e-brake |
| JST-SM 2P F | GND VB+ |
black red |
black red |
light/horn power |
| JST-SM 3P M | GND SP SP5V |
black grey red |
black white red |
throttle |
| JST-SM 3P F | GND +5VP TA |
black red purple |
black red white |
pedal sensor |
| Molex/Spade 1x2 F | GND VK+ |
black orange |
unconnected | headlight (?)? |
| DJ7061A-2.8-21 | +5VP SC CR SB GND SA |
red yellow white green black blue |
red yellow white green black blue |
+5v Hall C speed magnet? Hall B GND Hall A |
| Deans plug F | VB- VB+ |
black red |
battery | |
| bullets F | A B C |
blue green yellow |
blue green yellow |
motor power |
LCD-M5 details
| P | What | Range | meaning | notes |
|---|---|---|---|---|
| P01 | Backlight Brightness | 1-3 | 1 min 2 mid 3 max |
|
| P02 | Speed unit | 0-1 | 0 km/h 1 miles/h |
|
| P03 | Battery Voltage | 24,36,48,60 | Volts | |
| P04 | Timeout | 0-60 | minutes | |
| P05 | PAS Range | 0-4 | 0 0-3 1 0-5 2 0-9 3 0-4 4 0-6 |
|
| P06 | Rim Size | 0-50 | inch | |
| P07 | Motor magnetic poles ratio | 1 - 100 | ||
| P08 | Speed limit | 0-100 | km/h | |
| P09 | Zero Start | 0-1 | 0 assist < 6 km/h 1 don’t assist < 6km/h |
|
| P10 | Running Mode | 0-2 | 0 only pas 1 only throttle 2 pas and throttle |
|
| P11 | PAS Start Sensitivity | 1-24 | short - long | |
| P12 | PAS Start Strength | 1-5 | weak - strong | |
| P13 | PAS Sensor Type | 5-8 | ||
| P14 | Current Limit | 1-22 | no effect for me | |
| P15 | Undervoltage | |||
| P16 | Clear ODO | |||
| P17 | Automatic cruise | 0-1 | 0 No auto cruise 1 If keep certain speed for 6 seconds, go to cruise mode |
|
| P18 | Speed indication ratio | 50-150 | % | |
| P19 | PAS 0 disable | 0-1 | 0 PAS 0 enabled 1 PAS 0 disabled |
|
| P20 | Communication type | 0-3 | 0 2 protocol 1 5S agreement 2 standby 3 standby |
UART Protocol
Baud Rate: 9600
Display -> Controller
| byte | byte | what | examples |
|---|---|---|---|
| 00 | 01h | ||
| 01 | 14h | ||
| 02 | 01h | ||
| 03 | 02h | P10 running mode | 0 only pas 1 only throttle 2 pas and throttle |
| 04 | 03h | PAS | ffh = no assist 01h = min 0fh = max |
| 05 | 80h | bitwise | bit 6 = P09 don’t assist < 6km/h bit 7 = manual light |
| 06 | 01h | P07 Magnetic poles ratio | 01 = 01 100 = 64h |
| 07-08 | 01h 04h | P06 Rim Size | 5(.)0 = 0032 26(.)0 = 0104 50(.)0 = 01f4 |
| 09 | 05h | P11 PAS start sensitivity | 01-24 |
| 10 | 01h | P12 PAS start strength | 01-05 |
| 11 | 00h | ||
| 12 | 64h | P08 speed limit | 0 = 0 100 = 64 |
| 13 | 16h | P14 / current limit | |
| 14-15 | 01h B8h | P15/undervoltage | 34(.)0 = 0154h 44(.)0 = 01B8h |
| 16 | 00h | ||
| 17 | 00h | ||
| 18 | 4Ch | bit-wise | bits 0-3 = PAS sensor type (P13) bit 6 = cruisemode (P17) |
| 19 | 12h | XOR |
Controller -> Display
| byte | byte | what | examples |
|---|---|---|---|
| 00 | 02h | ||
| 01 | 0Eh | ||
| 02 | 01h | ||
| 03 | 00h | bitwise | bit 5 = throttle stuck / E 008 |
| 04 | 40h | bitwise | bit 5 = braking bit 6 = ??? |
| 05 | 00h | ||
| 06 | 00h | current | 01h = 01.0A 02h = 02.0A |
| 07 | 00h | PWM(?) | 00h-ffh = 0% - 100%? |
| 08-09 | 00h 00h | wheel speed (MS) | 0507 = 05.7km/h 02e4 = 10.0km/h 0080 = 58.3km/h 0060 = 77.7km/h 005f = 78.5km/h 0058 = 84.8km/h |
| 10-12 | 00h 00h 00h | ||
| 13 | 4Dh | XOR of 00-12 |